Innovation
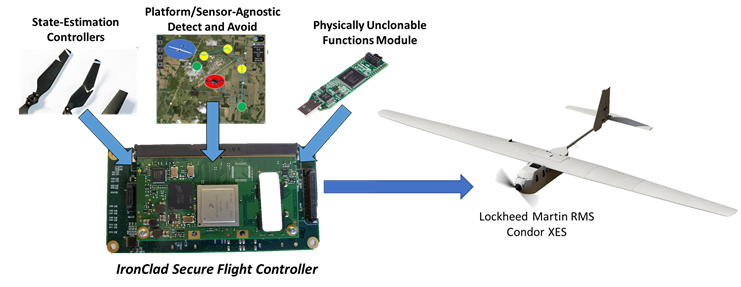
Asymmetric Technologies developed the IronClad Secure Flight Controller (SFC), which is a cyber-secure, robust open-architecture flight controller with advanced-computational capabilities available for additional high-level intelligent autonomy functions.
Objectives
The IronClad SFC directly addresses the following Round 4 SOARING AOIs: AOI #2: Field Swappable Aircraft Variants, AOI #7: Onboard Protocols for Non-Traditional Systems, AOI #8: Computational Efficiencies and Onboard Heat Management, AOI #13: Detect and Avoid, and AOI #14: Security Assurance, Encryption, and Testing.
Additionally, these capabilities closely align with our federal partner’s mission needs at AFRL, as open-architecture, advanced, affordable UAS flight controllers have applicability across USAF UAS platforms and development programs. This work has a direct and impactful effect on Ohio jobs, with high-paying research and engineering jobs from further developments and integrations of the IronClad SFC on new UAS platforms as well as manufacturing jobs and additionally university spin-off companies such as that planned for the Physically Unclonable Devices.
Background
Integration of unmanned air systems (UASs), personal air vehicles (PAVs) and logistics delivery air vehicles (LDAVs) into the National Air Space (NAS) will require advances on numerous fronts. These include clear guidance on FAA regulations for manned and unmanned aircraft in integrated airspace, flight certification regulations for individual UAS platforms, and standardized communication protocols. From a hardware perspective, UAS Flight Controllers (FCs or also commonly called autopilot systems) cut across all these requirements. Successful long-term deployment and operation of PAVs, LDAVs and other UAS will require substantially more capable and resilient flight controller capabilities than are currently available. Development of a more robust and secure flight control capability with OFRN funding will help to make the State of Ohio a leader in PAV, LDAV and UAS development, as well as bringing numerous federal funding and commercialization opportunities. Flight controllers are typically small-form-factor computers that serve as the brain of the UAS, with avionics sensors to help the UAS understand where and how it is oriented in space, onboard computing capacity to autonomously route plan and control the vehicle, and additional inputs/outputs for radios and other sensors.
There are a variety of robust UAS flight controllers available today, but they generally fall into two distinct categories:
- Open-hardware flight controllers, which can be used on a wide variety of platforms, but have no excess computing capacity.
- Proprietary, closed flight controllers that work very well on specific platforms but are expensive and have zero extendibility for future mission needs, neither of which have been designed with cybersecurity requirements in mind.
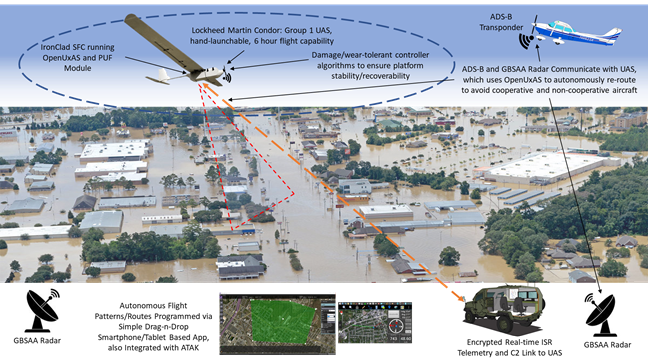
The team is led by Asymmetric Technologies, a Service-Disabled, Veteran-Owned Small Business (SDVOSB) located in Columbus, as well as The Ohio State University, Ohio University, and our federal partners at the Air Force Research Laboratory (AFRL). Additionally, Lockheed Martin’s sUAS group provides a commercialization partner as well as an sUAS platform (the Condor) developed in conjunction with AFRL for use in the concluding flight demonstrations.
Commercial Goals
Development of the IronClad SFC has been funded primarily by the Department of Homeland Security (DHS) with additional scope and funding from the Office of Naval Research (ONR) and the AFRL for the US Air Force. The IronClad SFC has been successfully integrated and tested on a variety of small UAS (sUAS) platforms.
There are three key capabilities that require further development to ensure the flight controller is resilient and capable for the emerging class of larger UAS, including PAVs and LDAVs:
- Adding advanced state-estimation tools to provide damage-and wear-tolerant UAS control systems that can recover from unknown faults and land safely.
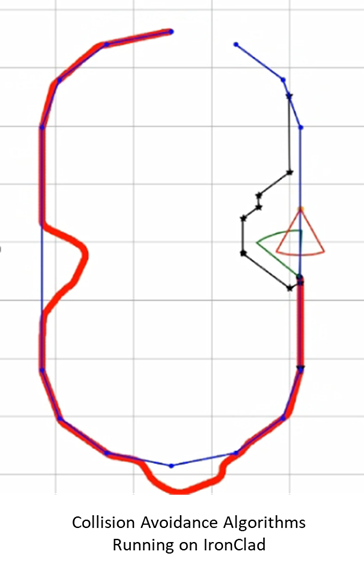
- Integrating an open-architecture, platform-and sensor-agnostic detect and avoid autonomy suite with on-board flight-control software that reduces or eliminates the need for constant user monitoring.
- Developing additional cyber-security features, including physically unclonable functions (PUFs), to guard against emerging cyber threats.Our team proposes to develop each of these three capabilities in parallel during the OFRN SOARING Round 4 program, with a series of concluding flight demonstrations that showcase the features in realistic scenarios.